
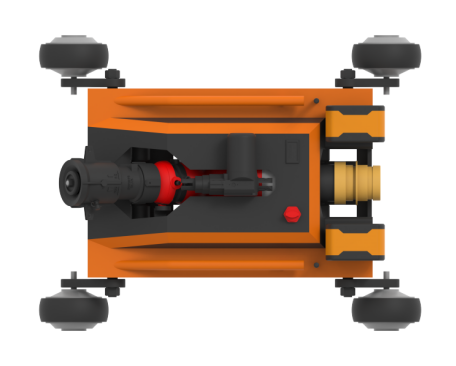
RXR-M30LG Portable electric wheel type four-wheel drive fire fighting robot



| 1.Overview |
|
Portable electric wheel four-drive fire fighting robot is a small fire fighting robot developed by our company to adapt to the special working environment of fire fighting, light weight, easy to carry, simple operation and skilled operation of the user only need simple training. It can be used in a variety of large petrochemical enterprises, tunnels, subways and other increasing oil gas, gas leakage explosion, tunnel, subway collapse and narrow channels and other disaster hazards, fire fighting robots play a decisive role in rescue , mainly replacing firefighters in the dangerous fire or smoke fire site rescue special equipment.
|
| 2.Application |
| l Fire rescue in large petroleum and chemical enterprisesl Tunnels and subways that are prone to collapse need to be used for rescue and fire fightingl Narrow passageways and small Spaces
l Rescue under heavy smoke, toxic and harmful gases l rescue site where fire fighting is required at close distance and casualties are likely to occur when personnel are near
|
| 3.Features |
| 1. Small size and light weight;2. Remote control;3. Fast speed, can quickly reach the rescue scene;
4. Shrinkage function: each wheel can be controlled separately, improve obstacle crossing performance, and better apply to rescue scenes; 5. Self-protection spray system: the robot should have a self-protection spray system to cool the robot in the fire; |
|
4.Main specification |
|
Overall performance parameter 1) Overall size: 747×695×432 mm 2) Machine weight: 58.2kg 3) speed: 1.39m /s 4) Linear deviation: 0.25% 5) Climbing ability: 71.4% 6) Obstacle crossing height: 160 mm 7) Minimum ground clearance: 120 mm 8) Roll stability Angle: 30° 9) Towing capacity: Two DN80 waterbelts filled with water run normally 10) Remote control distance: 816 m 11) Working time: 1h05 min 12) Drive form: electric four-wheel drive; Fire extinguishing system parameter 1) Maximum flow: 30.3L /s 2) Working pressure: 1.0MPa 3) Spray distance: 61 m 4) Self-pendulum function: horizontal rotation Angle -30° ~ 30°, tilt Angle 10°~70° 5) Shrinkage function: the robot can be remotely shrunk to a preset state to reduce the appearance size 6) Self-protection spray system: the robot should have a self-protection spray system to cool the robot in the fire 7) Water belt self-disconnecting: the robot should have a water belt rapid disconnecting system (optional) |
Products categories
-

TIGER-04 6X6 Differential wheeled robot chassis
-

LT-UAVFP Fire extinguishing unmanned aerial veh...
-

RXR-M 30D fire fighting dry powder fire extingu...
-

2-S RXR-MC80BD Explosion-proof firefighting and...
-

DRAGON-03 medium-sized explosion-proof crawler ...
-

DRAGON-02A Single swing arm crawler robot chassis